我国AGV发展历程较短,但一直以来不断加大在这一领域的投入,以改变我国AGV长期依赖进口的局面。经过不懈地努力终于取得了一定的成效,北京起重运输机械研究所、清华大学、中国邮政科学院邮政科学研究规划院、中国科学院沈阳自动化所、大连组合机床研究所、国防科技大学和华东工学院都在进行不同类型的AGV的研制并小批投入生产。

1991年起,中科院沈阳自动化研究所/新松机器人自动化股份研究公司为沈阳金杯汽车厂研制生产了客车6台AGV用于汽车装配线中,可以说是汽车工业中用得比较成功的例子,并于1996年获国家科学技术进步三等奖。
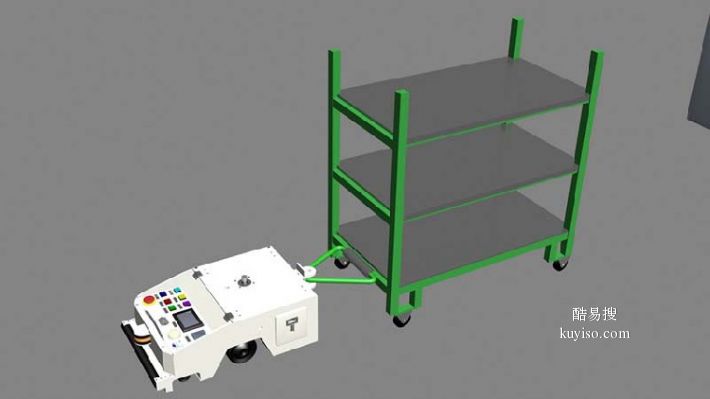
小车采用两后轮独立驱动差速转向,两前轮为万向轮的四轮结构形式。步进电机经减速器后通过驱动轮提供驱动力,当两轮运动速度不同时就可以实现差速转向。

包括底盘、车架、壳体和控制室和相应的机械电气结构如减速箱、电机、车轮等所组成,是AGV的基础部分。具有电动车辆的结构特征和无人驾驶自动作业的特殊要求。车架常用钢构件焊接而成,重心越低越有利于抗倾翻。板上常安置移载装置、电控系统、按键、显示屏等。

自动化程度高--由计算机,电控设备,磁气感应SENSOR,激光反射板等控制。当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由专业的技术人员向计算机发出指令,在电控设备的合作下,这一指令最终被AGV接受并执行--将辅料送至相应地点。

较小的场地要求--AGV比传统的叉车需要的巷道宽度窄得多。同时,对于自由行驶的AGV而言,还能够从传送带和其他移动设备上准确地装卸货物;
灵活性--AGV系统允许最大限度地更改路径规划;
调度能力--由于AGV系统的可靠性,使得AGV系统具有非常优化的调度能力;
工艺流程--AGV系统应该也必须是工艺流程中的一部分,它是把众多工艺连接在一起的纽带;
长距离运输--AGV系统能够有效地进行点对点运输,尤其适用于长距离运输(大于60米);
特殊工作环境--专用系统可在人员不便进入的环境下工作。
