我国AGV发展历程较短,但一直以来不断加大在这一领域的投入,以改变我国AGV长期依赖进口的局面。经过不懈地努力终于取得了一定的成效,北京起重运输机械研究所、清华大学、中国邮政科学院邮政科学研究规划院、中国科学院沈阳自动化所、大连组合机床研究所、国防科技大学和华东工学院都在进行不同类型的AGV的研制并小批投入生产。

1976年,北京起重机械研究所研制出第一台AGV,建成第一套AGV滚珠加工演示系统,随后又研制出单向运行载重500公斤的AGV,双向运行载重500kg、1000kg、2000kg的AGV,开发研制了几套较简单的AGV应用系统。
1991年起,中科院沈阳自动化研究所/新松机器人自动化股份研究公司为沈阳金杯汽车厂研制生产了客车6台AGV用于汽车装配线中,可以说是汽车工业中用得比较成功的例子,并于1996年获国家科学技术进步三等奖。

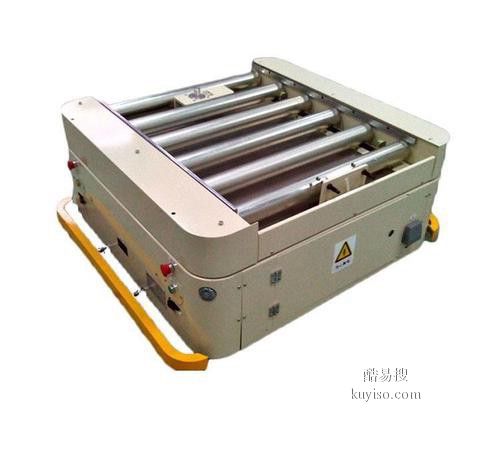
小车采用两后轮独立驱动差速转向,两前轮为万向轮的四轮结构形式。步进电机经减速器后通过驱动轮提供驱动力,当两轮运动速度不同时就可以实现差速转向。

车轮采用实心橡胶轮胎。车体后面两主动轮为固定式驱动轮,与轮毂式电机相连。前面两个随动轮为旋转式随动轮,起支承和平衡小车的作用。

减速器、驱动器、控制与驱动电路等。驱动系统一般为闭环方式与开环方式,前者以伺服直流电机为主,后者以步进电机为主。

AGV周边设施使用一般工业电力,根据用途而有不同要求。如充电间频率发生器、自动门、计算机室、通讯装置以及工作环境所需装置的动力等。根据车型、运行及载荷量而采用不同功率的蓄电他,一般都是蓄电池组合体。常用直流电压为12伏、24伏、48伏及72伏。

随着工厂自动化、计算机集成制造系统技术逐步发展、以及柔性制造系统、自动化立体仓库的广泛应用,AGV作为联系和调节离散型物流管理系统使其作业连续化的必要自动化搬运装卸手段,其应用范围和技术水平得到了迅猛的发展。下面是AGV的优点介绍:
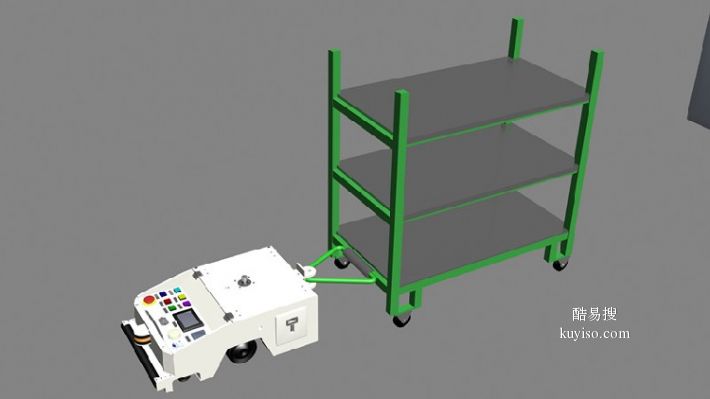
自动化程度高--由计算机,电控设备,磁气感应SENSOR,激光反射板等控制。当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由专业的技术人员向计算机发出指令,在电控设备的合作下,这一指令最终被AGV接受并执行--将辅料送至相应地点。
